
Why Robots?
|
The global CAM market is growing rapidly due to advancements in robotic technologies, improved production quality, enhanced machine efficiency, and increased industrialization. Robots offer 24/7 operation, exceptional repeatability with precision often below 50 microns, and a high return on investment (ROI) over time. They are crucial for advancing Industry 4.0, machine learning, and AI, driving innovation and improving productivity across various industries. |
|
Robot Offline Programming (OLP)
Traditionally, robots are taught using a Teach Pendant, a handheld device that manually guides the robot through tasks. This method can be cumbersome, risky, and time-consuming. Offline Robot Programming (OLP) allows operators to work remotely with digital 3D models to generate and validate robot paths before uploading them to the robot. This reduces manual teaching, enhances safety, and improves efficiency. Benefits of ROP:
|

|
Technical Features of GO2Robot
|
GO2CAM has all the infrastructure to implement OLP with a powerful mathematical engine for robot kinematics calculation. The objective of GO2CAM is to keep the bulk of the difficulty of robot programming within the software and make a robot as easy to use as a milling machine for the customer. The ROP in GO2cam is applicable: |
||
|
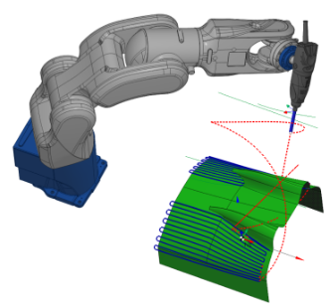
>For tasks for which the robot is expected to follow a continuous path, the work-flow is almost the same as for machine-tool
|
|
|
|
>For tasks for which the robot just needs to pass through several waypoints, an interactive interface is used to plan the whole path
|

|
|
|
The software can treat almost all serial 6-axis robots: |
|
|
|
Type 1 : Mostly all industrial 6-axis robots where the last 3 axis intersect on a point 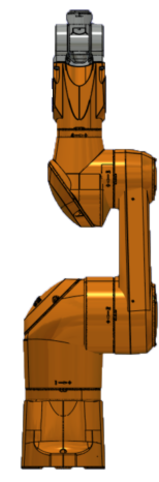
|
Type 2 : Most collaborative robots where the 2nd, 3rd, and 4th axis are parallel 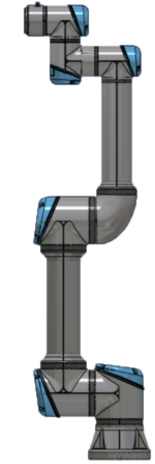
|
Type 3 : Like type 1 except the last three axis do not intersect on a point (Fanuc CRX) 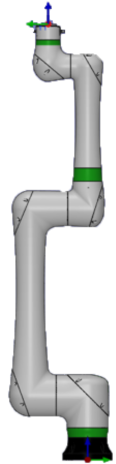
|
The steps to program robots in GO2cam are mainly the following :
-
CAM of the part, which can be reused for other robot cell.
-
Robot cell design, which can be reused for other parts.
-
Robot machining strategy setting
-
Simulation and collision detection
-
PP and techno functions setting
-
Robot program generation