
This option is used in several machining cycles, with different purposes and behaviors.
Please use the tree on the right side of the screen.
Cycle: millyuGO pocket, Facing Pocket, Pocket, Pocket+Contour, Pocket rework, Finish Contour, Finish Reworking, millyuGO, PAM, Facing Roughing, Pocket - Face, Flat Face Finish, Finish Contour -Shape, Plunge Pocketing, Plunge Contouring
Definition for Standard Cycles
When the toolpath is not continuous, GO2cam offers several possibilities to manage the motions between the passes. The motions in rapid or Fmax feedrate or a ratio of rapid feedrate can be defined. Here are the parameters to adjust:
Motions
|
|

|
Rapid: rapid motions are done. |
|
|

|
G1 Fmax: the motions are done with Fmax value, which is defined in the machine file. |
|
|

|
G0/G1 Fmax: we modulate the feedrate according to the parameter Rapid/Fmax %. |
Fmax safety distance
It is the retract distance.
Rapid/Fmax %
|
Value = 0 The movement is done in feedrate with the maximum value available.
|
|
|
0 < Value < 1
Some movements are done in feedrate with the maximum value available.
|
|
|
Value = 1 The movements are all done in rapid. |
|
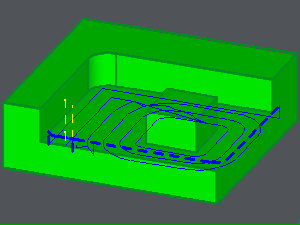
Cycle: Plunge Pocketing, Plunge Contouring
Definition for Plunge Pocketing, Plunge Contouring
Management of the rapid motions between XY passes and definition of the feedrates values. The feedrate values which will be taken are defined in the page 'Technology'. The Fmax value is defined in the machine file. It can be defined in the tab 'General'.
In the strategy, there are three options:
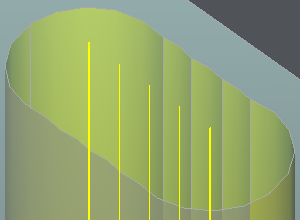
Rapid
|
|
There is no path displayed on GO2cam's screen. |
|
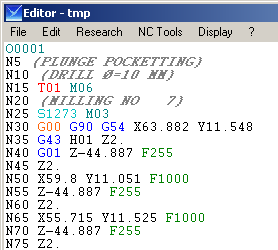
G00 is programmed at each motion between 2 passes. |
|
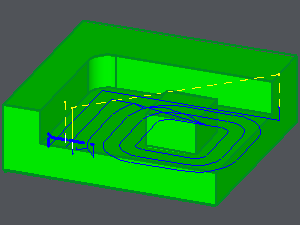
G1 Fmax
|
|
The path displayed is transparent. |
|
G01 is programmed for each motion between 2 passes. The Fmax defined in the machine file is F1000. |
|
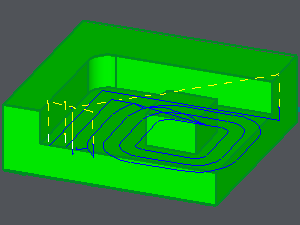
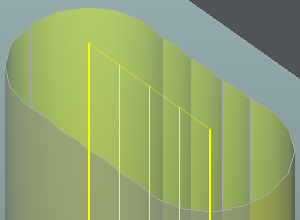
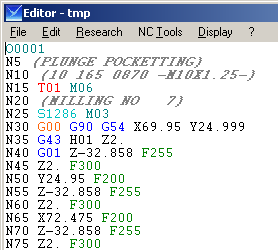
G1 feedrate
|
|
The path displayed is full. |
|
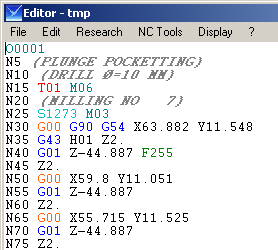
G01 is programmed for each motion between two passes. The feedrates values are read in the page 'Technology' of the cycle. Use the return (in Z) and retract (in XY) feedrates, in our example respectively F300 and F200. Also use the general feedrate for each G1 motion (here F255). For this, set return and retract feedrates to 0. |
|