
|
|
Approach Point |
Approach and return points are very useful in cases where we want to manually control the path of the tool on the first approach to the part and the return after the machining cycle. One example where their uses is crucial is for machining specific shapes with specific tools where we must control every motion of the tool. In general, it’s also applicable in simpler cases and cycles, normally just to minimize any risk of collision or optimize the toolpath motion with the machine. |
|
|
|
Return Point |
||
|
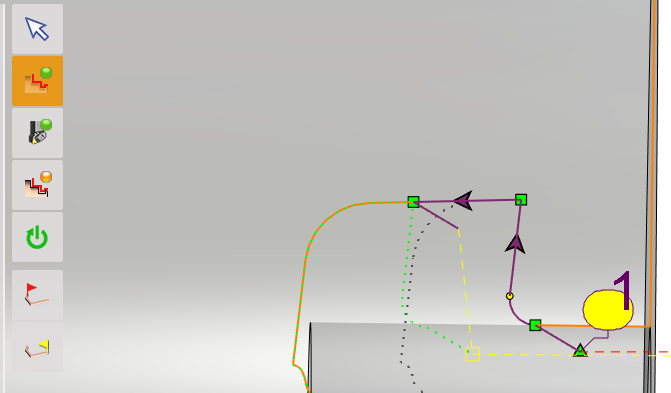
1/ Access to the commands is within the geometry selection phase for every cycle be it turning or milling. The approach point is in red and return point in yellow. To add an approach or return point, simply click on the command. The following steps are valid for both the approach and return points. |
|
||
|
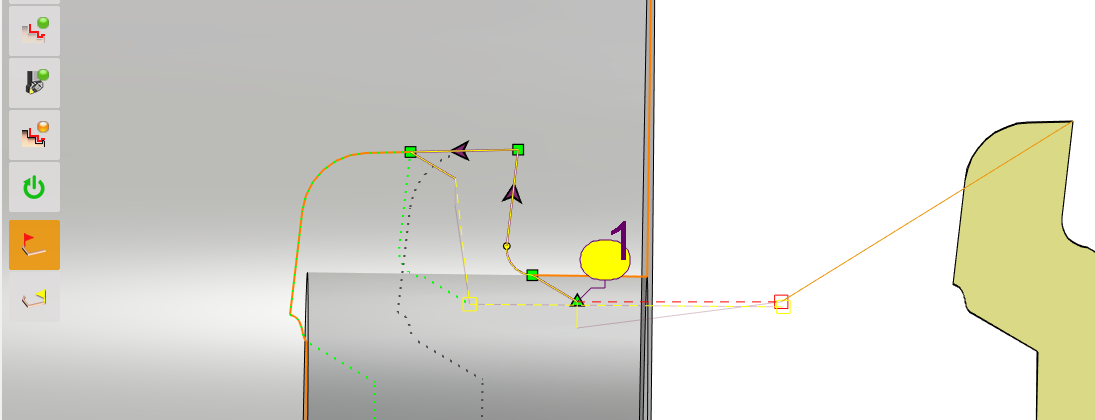
2/ For the first point, the extended line will be from the first point of contact with the part or the last point of contact for the case of the return point. If there are existing points, the line will extend from those points.
|
|
||
|
3/ Click on the required location on the program window to define each point hence generating the toolpath. 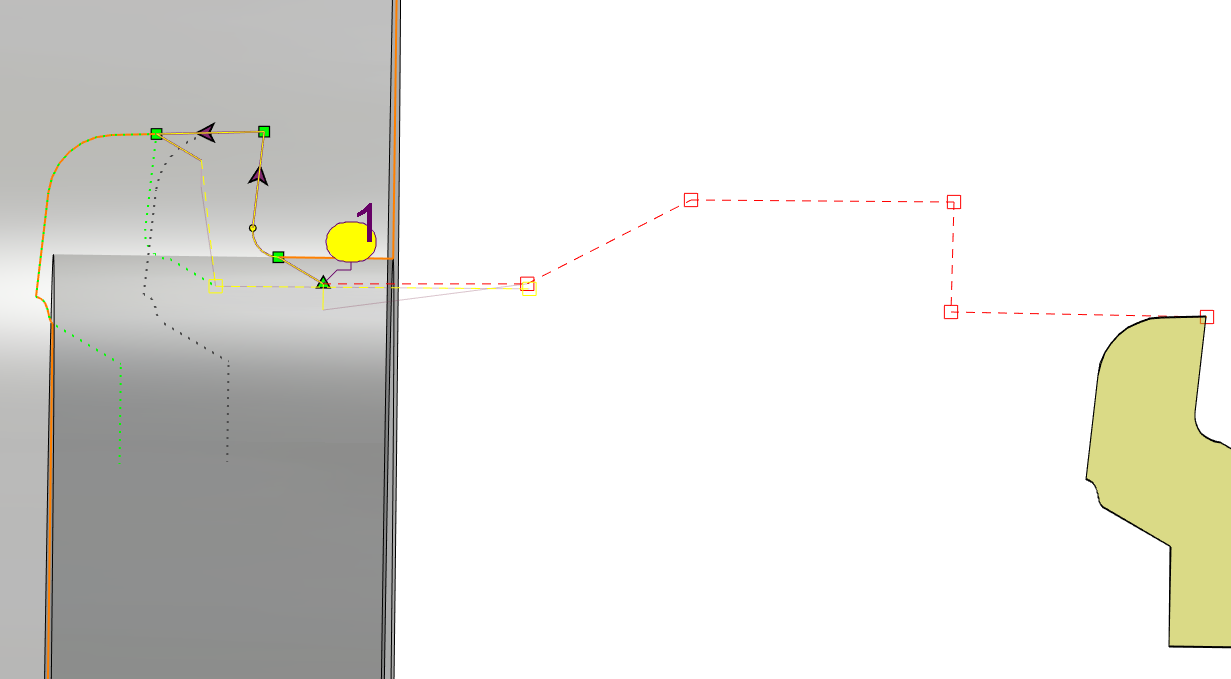
|
4/ Double-click on any of the points to delete them or click on one point to displace it with the pointer and click again to validate its new position. 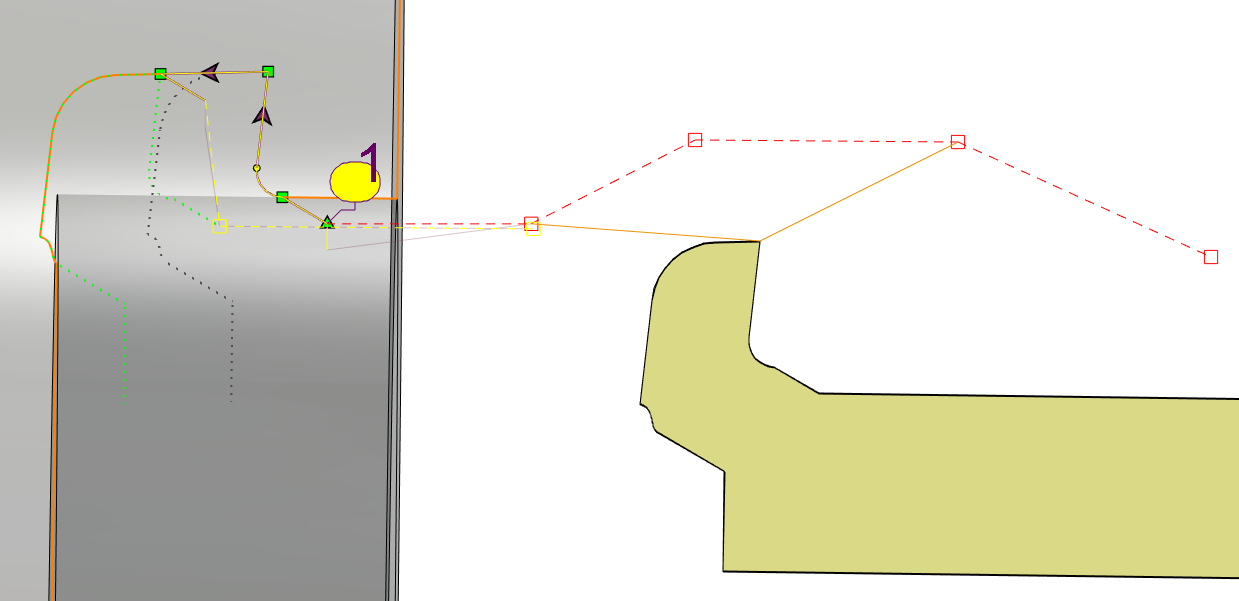
|
||
|
We can also use some guide line and points to define a specific tool path. In the case where we are using the approach and return points to actually define a machining path, we have to use the point to point cycle to define it. Watch the video on the right demonstrating the manipulations of the approach and return points and and example of the specific case. |

|
||