
It is recommended to run these application examples with a version later than 6.12.209.
You may need to change the carried tool/part configuration to suit your application. To do this, modify the component attached to Robot Axis 6 (switching between Spindle → Tool Support and Work Assembly Support, or the reverse). Then open the DH table of robot window, click Validate, and let the automatic rectification run.
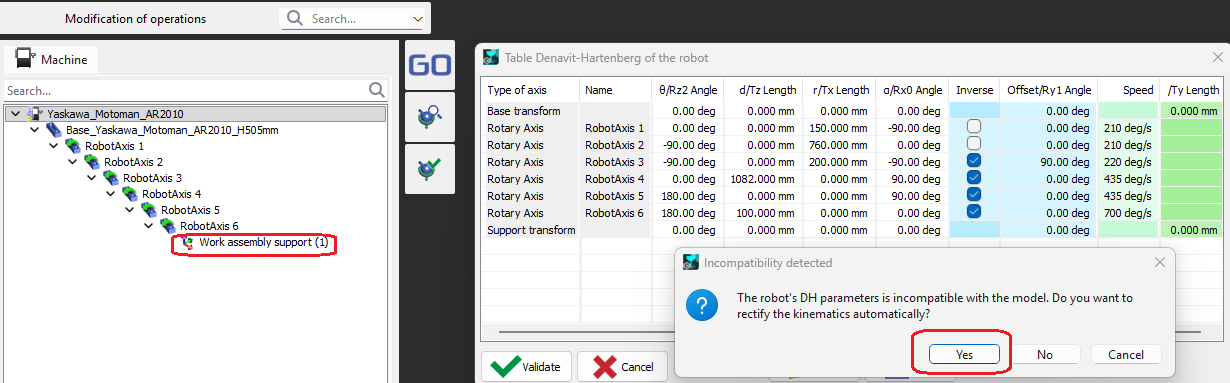
You may also need to complete the robot setup by adding a tool support when the robot is configured as part support, or by adding a part support when the robot is configured as tool support.
MCG for robots and cobots
|
Brand |
Model |
Type |
Reach (mm) |
Tool/Part carried |
Link |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
Robot |
901 |
Tool carried |
|
|
ABB |
IRB-1300-1150 |
Robot |
1150 |
Tool carried |
|
|
ABB |
IRB_4600_40_2550 |
Robot |
2550 |
Tool carried |
|
|
Comau |
Racer5-0_80 |
Robot |
809 |
Tool carried |
|
|
Denso |
VS068 |
Robot |
710 |
Tool carried |
|
|
Elite |
CS66 |
Cobot |
914 |
Part carried |
|
|
Elite |
CS612 |
Cobot |
1304 |
Tool carried |
|
|
Fanuc |
ARCMate_100iD |
Robot |
1441 |
Tool carried |
|
|
Fanuc |
CR-7iA_L |
Robot |
911 |
Tool carried |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
Tool carried |
|
|
Fanuc |
LR-Mate-200iD-7L |
Robot |
911 |
Tool carried |
|
|
Fanuc |
M20iD_25 |
Robot |
1831 |
Tool carried |
|
|
Fanuc |
M-710iC_70 |
Robot |
2050 |
Tool carried |
|
|
Kawasaki |
RS005L |
Robot |
903 |
Tool carried |
|
|
Kawasaki |
RS005N |
Robot |
705 |
Tool carried |
|
|
Kuka |
KR_6_R700 |
Robot |
726 |
Tool carried |
|
|
Kuka |
KR_20_R1810 |
Robot |
1810 |
Tool carried |
|
|
Kuka |
KR_90_R2700 |
Robot |
2702 |
Tool carried |
|
|
Nachi |
MZ07L |
Robot |
912 |
Tool carried |
|
|
Stäubli |
TX2-40 |
Robot |
515 |
Tool carried |
|
|
Stäubli |
TX2-60 |
Robot |
670 |
Tool carried |
|
|
Stäubli |
TX-90 |
Robot |
1000 |
Tool carried |
|
|
Stäubli |
TX2-90L |
Robot |
1200 |
Tool carried |
|
|
Stäubli |
TX2-90XL |
Robot |
1450 |
Part held |
|
|
Stäubli |
TX2-200 |
Robot |
2000 |
Part held |
|
|
STEP |
SD7-900 |
Robot |
912 |
Tool carried |
|
|
Universal Robots |
UR5E |
Cobot |
850 |
Tool carried |
|
|
Yaskawa |
Motoman_AR2010 |
Robot |
2010 |
Tool carried |
|
|
Yaskawa |
Motoman_GP8 |
Robot |
727 |
Tool carried |
|
|
Yaskawa |
Motoman_GP225 |
Robot |
3935 |
Tool carried |
|
|
Turin |
TR03-610B |
Robot |
616 |
Tool carried |
MCG of positioners
|
Brand |
Model |
Axes |
Link |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|