
-
A workstation usually includes more devices (isolation cell, external axes, etc.) than just the robot arm.
-
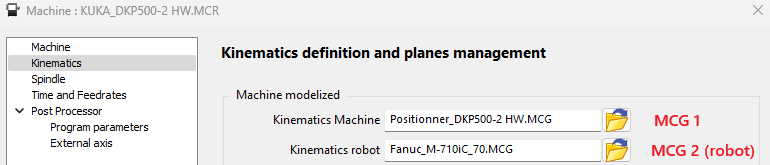
Recommended: use 2 machines (MCGs)
-
MCG 1 = main machine cell (with external element position).
-
MCG 2 = robot arm only.
-
Advantages with 2 machines:
-
Easy to replace the robot arm while keeping the main cell (MCG 1).
-
Robot base can be repositioned (double-click on the robot base in machine tree) to adapt to part/tool.
-
If only the robot arm is needed
-
MCG 1 = robot arm.
-
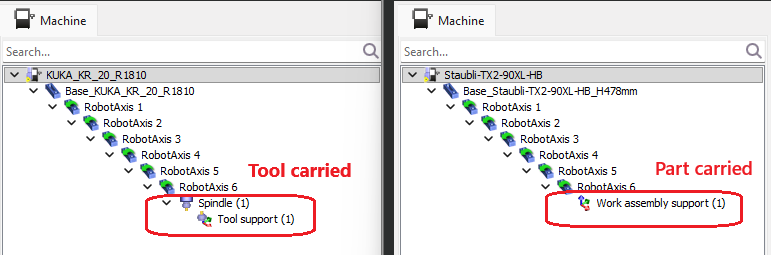
A support, either for the tool or for the workpiece, must always be attached to the robot flange (RobotAxis 6). The other support may be defined in either MCG 1 or MCG 2.
-
Tool support on robot flange = tool-carried.
-
Workpiece support on robot flange = part-carried.
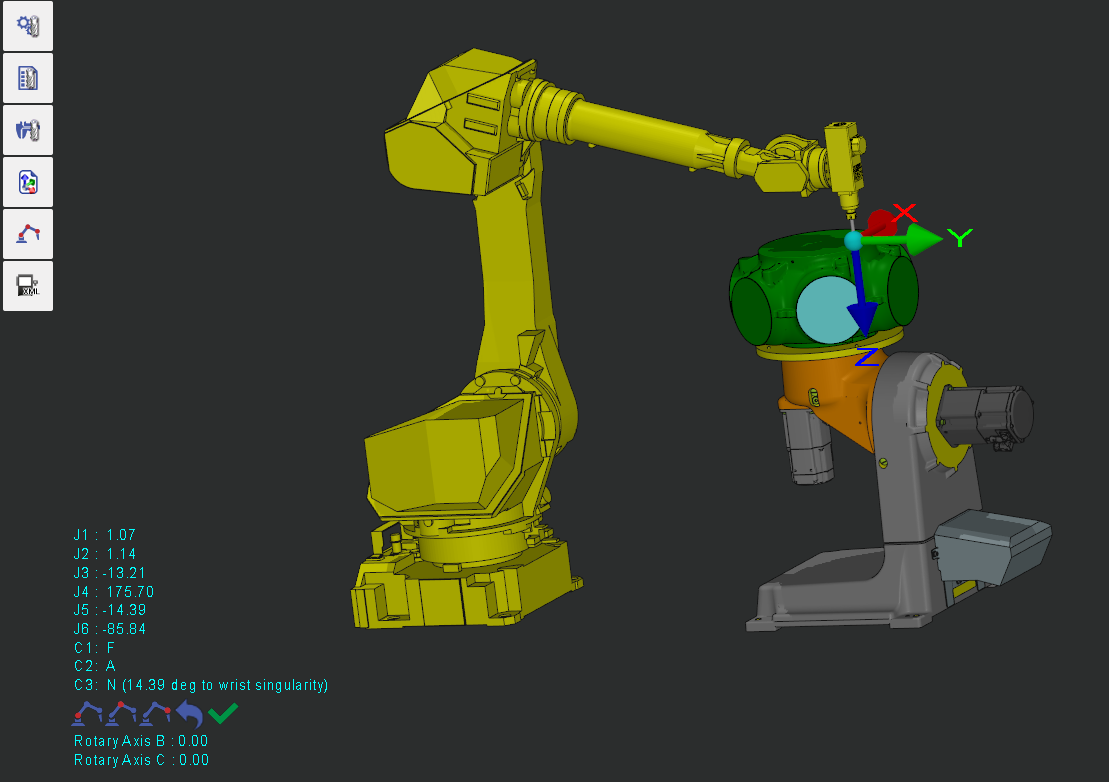
Reachability precheck
-
In tooling, double-click on any point of the part → robot automatically positioned there for reachability preview.